Bellman ford算法求最短路c++
适用
bellman-ford算法适用于有负边,且最短路径有边数限制的题目。
如果没有边数的限制并且有负边我们一般用spfa算法。
讲解
其实和普通版的dijkstra差不多,略微有几处不同的地方。
- 1,我们每次能遍历到所有节点就行了,所以就用结构体存储就可以了,当然你用别的也是可以的。
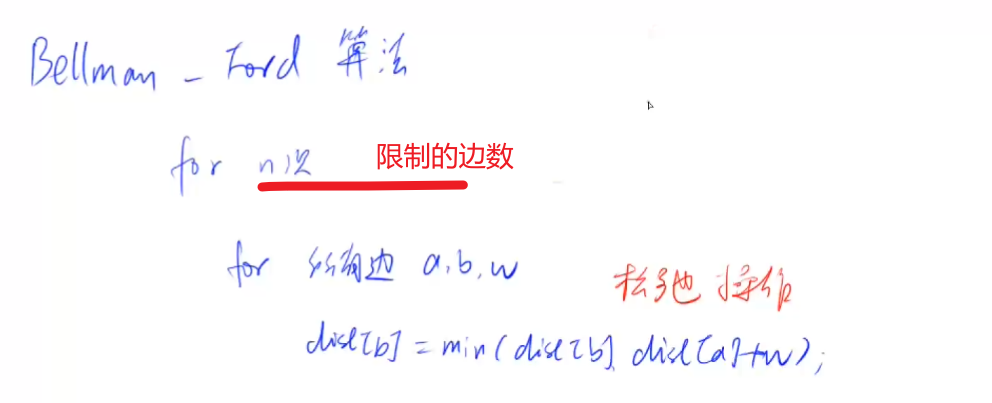
- 2,在函数中第一次遍历,遍历多少次就代表最后有多少条边。限制变数的条件在这里实现。
- 3,这里有个last数组,就是备份上一次的,要不然更新的时候容易出现串联,就是因为每次要遍历所有的节点,每次要更新一条边,举个例子吧。
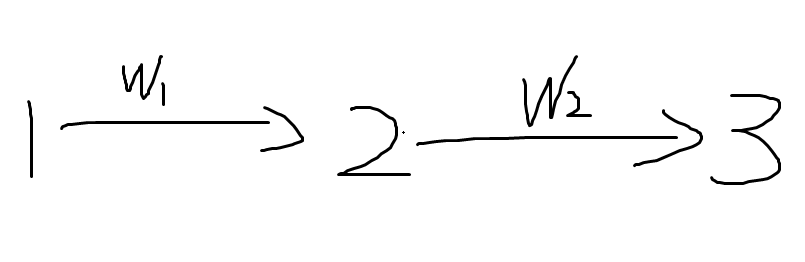
假如说现在在j的for循环中,有一次更新了2的dist,但是我们我们在下一次更新3的时候我们不应该用2的w1权重,而是应该用2的上次的正无穷权重,因为一个i循环每个节点只能向外伸展一个节点。 - 4,然后就是普通的更新了,a到b有一条边,看a能不能把b更新了。
- 5,最后就是输出的时候,为什么要用
dist[n] > 0x3f3f3f3f / 2
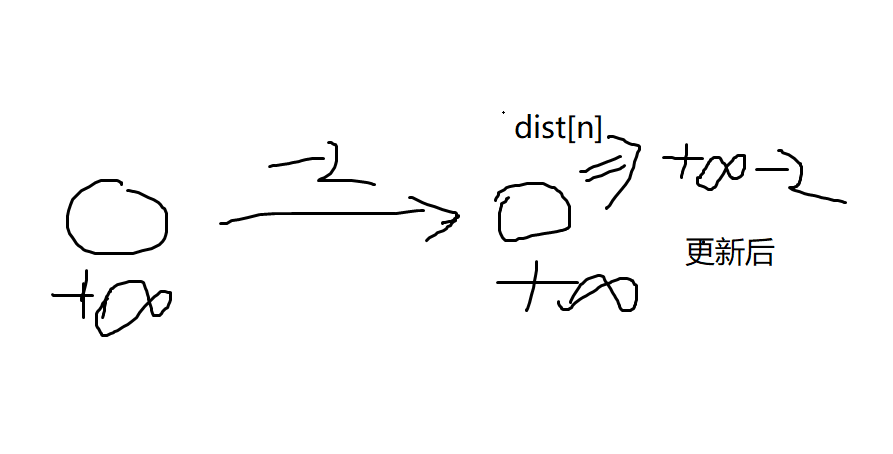
- 6,因为函数中要用到m,所以输入的时候不能用
while(m--)
流程
源码
#include <bits/stdc++.h>
using namespace std;
const int N = 510, M = 10010;
int n, m, k;
int dist[N];
int last[N];
struct Edges
{
int a, b, w;
}edges[M];
void bellman_ford()
{
memset(dist, 0x3f, sizeof dist);
dist[1] = 0;
for (int i = 0; i < k; i ++)
{
memcpy(last, dist, sizeof dist); // 想当于给当前状态打了个快照,然后进行下次更新的时候是依据这次快照更新的。
for (int j = 0; j < m; j ++ )
{
dist[edges[j].b] = min(dist[edges[j].b], dist[edges[j].a] + edges[j].w);
}
}
}
int main()
{
cin >> n >> m >> k;
for (int i = 0; i < m; i ++ )
{
int a, b, c;
cin >> a >> b >> c;
edges[i] = {a, b, c};
}
bellman_ford();
if (dist[n] > 0x3f3f3f3f / 2) cout << "impossible" << "\n";
else cout << dist[n] << "\n";
}
版权声明:
作者:徐锦桐
链接:https://www.xujintong.com/2023/03/06/115/
自由转载-非商用-非衍生-保持署名(创意共享3.0许可证)
作者:徐锦桐
链接:https://www.xujintong.com/2023/03/06/115/
自由转载-非商用-非衍生-保持署名(创意共享3.0许可证)
THE END